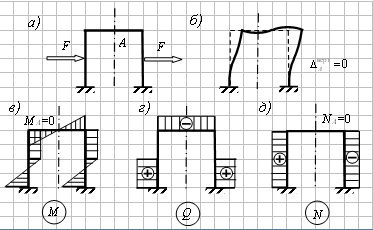
1) Что такое действительная работа сил?
Действительной называется работа силы на перемещении ею же и вызванном.
2) Что такое возможная работа сил?
Возможной работой называют работу силы на перемещении, вызванной другими факторами, в т. ч. и виртуальными.
3) Что понимают под действительным перемещением?
Действительными перемещениями в расчётной схеме называют перемещения, вызываемые внешними воздействиями на сооружения (силовые нагрузки, изменение температуры, неравномерная осадка опор, а также неточность изготовления отдельных частей сооружения).
4) Что понимают под возможным перемещением?
Возможными перемещениями называют перемещения, вызываемые, как правило, виртуальными, задаваемыми для расчёта факторами.
5) Покажите характер деформации бесконечно малого элемента стержня под действием продольной силы и запишите ее выражение.
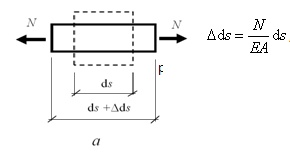 |
| |||||||||||||||
6) Покажите характер деформации бесконечно малого элемента стержня под действием изгибающего момента и запишите ее выражение.
|
7) Покажите характер деформации бесконечно малого элемента стержня под действием поперечной силы и запишите ее выражение.
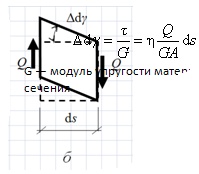
|
8) Почему работа внутренних сил отрицательна?
Работа внутренних сил всегда отрицательна, так как действующее усилие (внутренние силы) препятствует развитию деформации (внутренние силы противодействуют деформации, стремятся вернуть тело в первоначальное состояние).
9) Запишите выражение для действительной работы внутренних сил.

10) Запишите выражение для возможной работы внутренних сил.
 i — внутренние силы, совершающие работу, k — внутренние силы, вызывающие деформации
i — внутренние силы, совершающие работу, k — внутренние силы, вызывающие деформации
11) Сформулируйте теорему о взаимности возможных работ.
Возможная работа сил состояния i на перемещениях, вызванных силами состояния k, равна возможной работе сил состояния k на перемещениях, вызванных силами состояния i (Aij = Aji).
12) Сформулируйте теорему о взаимности возможных перемещений.
Возможное перемещение по направлению i от единичной безразмерной силы, приложенной по направлению j, численно равно возможному перемещению по направлению j от единичной безразмерной силы, приложенной по направлению i (δij = δji).
13) Сформулируйте теорему о взаимности возможных реакций.
Возможная реакция в связи i от единичного смещения связи j численно равна возможной реакции в связи j от единичного смещения связи i (rij = rji).
14) Как в общем случае определяются перемещения в статически определимых стержневых системах?
 По формуле Максвелла-Мора для определения перемещений от действия внешней нагрузки:
По формуле Максвелла-Мора для определения перемещений от действия внешней нагрузки:
ΔkF = .
15) Какой принцип строительной механики лежит в основе формулы Мора?
Принцип взаимности возможных работ с учётом принципа возможных перемещений: если упругая деформируемая система под действием приложенных к ней внешних сил находится в равновесии, то при всяком возможном бесконечно малом перемещении точек этой системы сумма работ ее внешних и внутренних сил будет равна нулю.
16) Каков физический смысл левой и правой частей формулы Мора?
Работа внешних сил равна работе внутренних сил: работа сил вспомогательного состояния на перемещениях грузового равна работе сил грузового состояния на перемещения вспомогательного.
|
17) Какой вид принимает формула Мора при определении перемещений в изгибаемых системах?
ΔkF = . 
18) Какой вид принимает формула Мора при определении перемещений в изгибаемых системах, состоящих из стержней постоянного по длине сечения?
|
ΔkF = .
19) Какой вид принимает формула Мора при определении перемещений в фермах?
ΔkF = , где Сф — число стержней фермы, учитывают только второй член.
, где Сф — число стержней фермы, учитывают только второй член.
20) Какой вид принимает формула Мора при определении перемещений в комбинированных системах?
ΔkF = + . 
21) Схемы каких состояний необходимо рассмотреть при определении перемещений по формуле Мора?
Вспомогательных состояний и грузового.
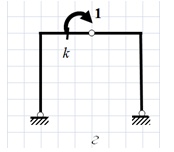
22) Как выбрать схему вспомогательного состояния при определении линейного перемещения?
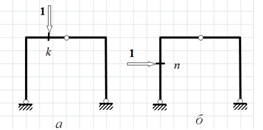
23) Как выбрать схему вспомогательного состояния при определении углового перемещения?
24) Как выбрать схему вспомогательного состояния при определении взаимного угла поворота двух сечений?
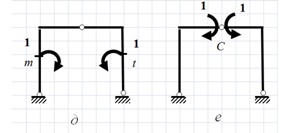
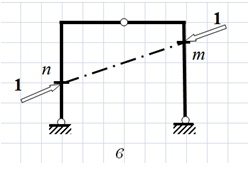
25) Как выбрать схему вспомогательного состояния при определении изменения расстояния между двумя сечениями?
26) Почему в изгибаемых системах работа поперечных и продольных сил не принимается во внимание?
Работа поперечных и продольных сил не принимается во внимание, потому что деформации продольные и поперечные (от этих сил) малы по сравнению с деформациями изгиба.
27) Какие способы вычисления интеграла Мора Вы знаете?
Способ непосредственного интегрирования (нами не изучается), «перемножение» эпюр способом Верещагина, «перемножение» эпюр по формулам перемножения.
28) Сформулируйте идею вычисления интеграла Мора способом Верещагина.
Строятся эпюры изгибающих моментов Mf и Mk грузового состояния и вспомогательного, разбиваются на участки (простые геометрически фигуры) и производится расчёт по формуле: ∫(MKMP/EI)dx = (1/EI)*ωMp*y0, где ωMp — площадь эпюры MP, а y0 — координата центра тяжести фигуры на участке MK. Площадь всегда берут по криволинейной эпюре, если обе прямолинейны, то безразлично, где брать площадь, а где ординату.
29) Как "перемножить" эпюры, имеющие вид трапеций?
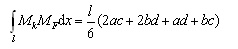
30) Как "перемножить" криволинейную эпюру с прямолинейной?
 Способом Верещагина или по формуле Симпсона: , где
Способом Верещагина или по формуле Симпсона: , где
h = 0,5(a + b); f = 0,5(c + d) ± ql2/8
31) Как определяются знаки определяемых перемещений?
Если в результате расчета, перемещение получилось положительным, это означает, что направление перемещения совпадает с направлением единичной силы, использованной во вспомогательном состоянии.
32) Какое правило знаков следует соблюдать при "перемножении" эпюр?
Знак «+» при совпадении ординат, а знак « - », если не совпадают (в зависимости от положения эпюры).
33) В каких случаях при вычислении интеграла Мора используется формула Симпсона?
При любых значениях ординат; применима, если эпюра MP очерчена по квадратной параболе, при очертании по кубической параболе эта формула является приближённой.
34) Как записывается формула Симпсона при "перемножении" эпюр?
Смори вопрос № 30.
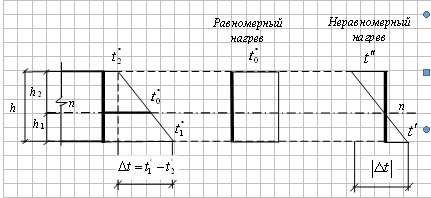
35) Как определяются перемещения в стержневых статически определимых системах при температурном воздействии?
 ,где ΩNk — площадь эпюры Nk, а ΩMk — площадь эпюры Mk; α — коэффициент линейного расширения материала, t0 — значение температуры на нейтральной оси, Δt — перепад температуры, характеризующий неравномерный нагрев.
,где ΩNk — площадь эпюры Nk, а ΩMk — площадь эпюры Mk; α — коэффициент линейного расширения материала, t0 — значение температуры на нейтральной оси, Δt — перепад температуры, характеризующий неравномерный нагрев.
36) Как определить температурное воздействие на уровне нейтральной линии стержня?

37) Что положено в основу формулы определения перемещений от температурного воздействия?
Теорема о взаимности возможных работ.
38) Как определить температурное воздействие, вызывающее искривление стержня?
|
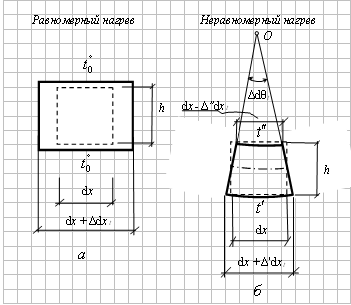
39) Какие виды деформаций описывает каждый член формулы определения перемещений от температурного воздействия?
Удлинение (укорочение) с искривлением (N) и растяжение(сжатие) с изгибом (М).
40) Какие правила знаков используются при определении перемещений от температурного воздействия?
Каждый член при вычислении по участкам будет положительным при совпадении характера деформации (растяжения с удлинением или изгиба с искривлением) от единичной силы вспомогательного состояния теплового воздействия. Оба члена формулы имеют знак «+», если характеристики воздействия от температуры и единичной приложенной силы в пределах стержня совпадают, в противном случае «-».
41) Как определяются перемещения, вызванные неравномерной осадкой опор?
ΔkΔ = – ∑Ri∙Δi, где R — смещения от усилий, Δ — величина смещения.
42) Как определить знак произведения в правой части формулы определения перемещений при неравномерной осадке опор?
Произведение под знаком суммы берутся по знаку работы. Произведение под знаком суммы представляет собой возможную работу, поэтому знак произведения определяется по тому, совпадает направление Ri с направлением Δi. При совпадении знак произведения положителен, при несовпадении – отрицателен.
43) Что положено в основу формулы определения перемещений от неравномерной осадки опор?
Теорема о взаимности возможных работ.
44) Запишите в общем виде формулу для определения перемещений, вызванных неточностью изготовления стержней.
ΔkΔ = ∑Ni∙Δi , где Ni – усилие в неточно изготовленном стержне по вспомогательному состоянию; Δi – величина неточности изготовления стержня.
45) Что положено в основу формулы определения перемещений, вызванных неточностью изготовления стержней?
Теорема о взаимности возможных работ.
46) Как определить знак произведения в правой части формулы определения перемещений при неточности изготовления стержней?
Перед знаком суммы в отличие от неравномерной осадки опор отсутствует знак минус, так как работа внутренних сил отрицательна. Правило знаков для произведения определяется по знаку возможной работы: при совпадении направлений – знак “плюс”, при несовпадении – знак “минус”.
47) Почему связи статически определимых систем являются безусловно необходимыми?
Так как эти связи делают систему геометрически неизменяемой.
48) Какие особенности статически неопределимых систем обусловлены наличием лишних связей?
1. Статически неопределимые системы по сравнению со статически определимыми более жёсткие, т.е. при одинаковых нагрузках перемещения в них значительно меньше.
2. В расчётных сечениях элементов статически неопределимой системы усилия меньше, чем в статически определимых при той же нагрузке.
3. Статически неопределимые системы обладают распределительной способностью: локальная нагрузка вызывает появление усилий во всех сечениях расчётной схемы, значения которых уменьшаются по мере удаления от места приложения нагрузки. В статически определимых системах локальная нагрузка может вызвать лишь локальное появление усилий.
4. Статически неопределимые системы более надёжны, нежели статически определимые: выход из строя одного из элементов расчётной схемы ещё не исчерпывает их несущей способности и при определённых условиях не приводит к обрушению.
5. Статически неопределимые конструкции проще в изготовлении и просты в эксплуатации, так как конструкция любого шарнира сложнее, чем жёсткое соединение.
6. При наличии начальных деформаций (тепловое воздействие, неравномерная осадка опор и неточность изготовления элементов конструкции) в статически неопределимых системах возникают усилия из-за наличия избыточных связей, препятствующих свободному развитию этих деформаций. Возникающие при этом усилия прямо пропорциональны жёсткости элементов статически неопределимой системы.
7. Статически неопределимые конструкции, как правило, более экономичные, нежели статически определимые, во-первых, за счёт меньших размеров поперечных сечений; во-вторых, за счёт изготовления.
49) Какие преимущества имеют статически неопределимые системы по сравнению со статически определимыми?
См. вопрос48.
50) Что называется степенью статической неопределимости?
Число избыточных связей, удаление которых превращает систему в статически определимую и оставляет геометрически неизменяемой.
51) В каком случае формула nc=C-3D становится неудобной для определения степени статической неопределимости?
В расчётных схемах, содержащих замкнутые контуры.
52) Как определить степень статической неопределимости расчетной схемы через известное число замкнутых контуров и простых шарниров?
nc = 3K – Ш, где K – число замкнутых контуров расчётной схемы (в том числе, между расчётной схемой и основанием, Ш – число простых шарниров (или связей, недостающих до полного защемления) расчётной схемы, 3K — степень статической неопределимости всех замкнутых контуров с предположением, что отсутствуют шарниры.
53) Поясните физический смысл формулы nc=C-3D.
С — число связей расчётной схемы, подлежащих определению; 3D — число уравнений статики.
54) Поясните физический смысл формулы nc=3К-Ш.
K – число замкнутых контуров расчётной схемы (в том числе, между расчётной схемой и основанием, Ш – число простых шарниров (или связей, недостающих до полного защемления) расчётной схемы, 3K — степень статической неопределимости всех замкнутых контуров с предположением, что отсутствуют шарниры.
55) Как определить степень статической неопределимости плоских ферм?
nc = (Cоп + Сф) – 2У = С – 2У
56) Поясните физический смысл формулы nc=С-2У.
С — число усилий и реакций, подлежащих определению; 2У — число уравнений статики для фермы.
57) Какие расчетные схемы называются статически неопределимыми?
Такие, в которых число связей превышает число уравнений равновесия, которые можно составить для этой схемы.
58) Что называют основной системой метода сил?
Статически определимая расчётная схема, полученная заменой некоторых избыточных связей реакциями.
59) Единственна или нет основная система метода сил для расчетной схемы?
Нет.
60) Перечислите основные свойства статически неопределимых систем.
См. вопрос 48.
61) Какие связи в расчетных схемах называют "лишними"?
Те, которые даже если удалить их, не приведут к разрушению конструкции.
62) Как получить статически определимую расчетную схему из заданной статически неопределимой?
Удалить лишние связи, заменив их реакциями.
64) Как определяется степень статической неопределимости расчетной схемы?
По формулам: nc=C-3D, nc=3К-Ш, nc=С-2У.
65) Какие способы удаления "лишних" связей Вы знаете?
Удаление внешних связей, внутренних и комбинированное (замена опорной связи — реакцией, внедрение шарнира с учётом моментов).
66) Какой принцип строительной механики положен в основу канонических уравнений метода сил?
Принцип независимости действия сил.
67) Чем выражается условие эквивалентности основной и заданной систем при расчете методом сил?
Для того, чтобы показанная основная система была по своей работе идентична заданной, необходимо условие: ΔA = 0 и ΔB = 0 или Δ11 + Δ12 + Δ1F = 0; Δ21 + Δ22 + Δ2F = 0
68) Сколько связей снимает "вводимый" шарнир между двумя дисками?
Одну.
69) Сформулируйте физический смысл канонических уравнений метода сил.
Сумма перемещений по направлению удалённых связей от действия реакций в этих связях и внешнего воздействия равна нулю.
70) Чем определяется порядок системы канонических уравнений метода сил?
Порядок системы определяется степенью статической неопределимости.
71) Какими особенностями обладает система канонических уравнений метода сил?
Справедлива для любой расчётной схемы с любой степенью статической неопределимости; коэффициенты при неизвестных с одинаковыми индексами — главные коэф-ты податливости,они всегда положительны δii > 0; остальные — побочные, для них выполняется теорема о взаимности возможных перемещений δij = δji; размерности коэф-ов при не известных легко определяются на основании их геометрического смысла, сформулированного ранее.
72) Каков физический смысл коэффициентов при неизвестных системы канонических уравнений метода сил?
Любой коэф-т системы канонических уравнений есть возможное перемещение по направлению первой удалённой связи от действия единичной безразмерной силы, приложенной по направлению второй удалённой связи.
73) Какие размерности могут иметь коэффициенты при неизвестных системы канонических уравнений метода сил?
м/кН; 1/кН; рад/кН; рад/(кН*м); м/(кН*м)
74) Каков физический смысл свободных членов системы канонических уравнений метода сил?
Являются перемещениями в статически определимой основной системе — возможное перемещение на направлению первой удалённой связи от внешнего воздействия.
75) Какие размерности могут иметь свободные члены системы канонических уравнений метода сил?
м; рад.
76) Как в основной системе метода сил учитывается влияние удаленных связей?
Для определения коэф-в при неизвестных и свободных членов системы канонических уравнений в основной системе метода сил необходимо найти усилия от единичных сил, последовательно прикладываемых по направлению удалённых связей, т. е. построить эпюры. Удалённые связи заменяются реакциями.
77) Как в системе канонических уравнений метода сил используется теорема о взаимности возможных перемещений?
Используется для побочных коэффициентов в системе канонических уравнений. Любой коэффициент системы канонических уравнений δij есть возможное перемещение по направлению удаленной связи i от действия единичной безразмерной силы, приложенной по направлению удалённой связи j.
78) Что представляют собой свободные члены системы канонических уравнений метода сил?
Перемещения в статически определимой основной системе по направлению удалённых связей от нагрузки или иного воздействия.
79) Как определяются коэффициенты при неизвестных системы канонических уравнений метода сил при расчете балок и рам?
80) Как определяются коэффициенты при неизвестных системы канонических уравнений метода сил при расчете ферм?
81) Как определяются коэффициенты при неизвестных системы канонических уравнений метода сил при расчете комбинированных систем?
82) Как определяются свободные члены системы канонических уравнений метода сил при расчете балок и рам?
83) Как определяются свободные члены системы канонических уравнений метода сил при расчете ферм?
84) Как определяются свободные члены системы канонических уравнений метода сил при расчете комбинированных систем?
85) Как произвести проверку правильности расчета методом сил?
Деформационная и статическая.
86) Сформулируйте физический смысл деформационной проверки расчета статически неопределимых систем.
Отрицает перемещения в заданной расчётной схеме по направлению удалённых связей.
87) Когда деформационная проверка расчета имеет смысл?
При выборе другой О.С.М.С., отличной от выбранной до этого, если характер эпюр не совпадает.
88) В чем заключается смысл статических проверок статически неопределимых систем?
Отсекаем схему от опор и прикладываем в точках сечений значения опорных реакций, которые равны продольным и поперечным силам, найденным ранее. Система должна быть уравновешена.
89) Сформулируйте основные свойства симметричных расчетных схем.
1) В симметричной расчётной схеме, загруженной симметрично расположенной нагрузкой, эпюры M, N и деформационная схема — симметричны, эпюра Q — кососимметрична. Следствие: В симметричной расчётной схеме, загруженной симметричной нагрузкой в сечениях, расположенных на оси симметрии, кососимметричные статические и кинематические факторы равны нулю.
2) В симметричной расчётной схеме, загруженной кососимметрично расположенной нагрузкой, деформационная схема, эпюра изгибающих моментов и эпюра продольных сил кососимметричны, а эпюра поперечных сил – симметрична. Следствие: В симметричной расчётной схеме, загруженной кососимметричной нагрузкой в сечениях, расположенных на оси симметрии, симметричные статические и кинематические факторы равны нулю.
90) Какие нагрузки в симметричных расчетных схемах называют симметричными?
Такие, которые имеют одну или две оси симметрии (одинаковы по знаку и значению).
91) Какие нагрузки в симметричных расчетных схемах называют кососимметричными?
Кососимметричной называется нагрузка, которая относительно оси симметрии отличается лишь знаками.
92) Какой характер имеют эпюры усилий в симметричной расчетной схеме при действии симметричной нагрузки?
 Эпюры моментов и продольных сил — симметричны, поперечные — кососимметричны.
Эпюры моментов и продольных сил — симметричны, поперечные — кососимметричны.
93) Какой характер имеет деформированная схема симметричной системы при действии симметричной нагрузки?
Деформированная схема симметрична.
94) Какой характер имеют эпюры усилий в симметричной расчетной схеме при действии кососимметричной нагрузки?
Эпюры моментов и продольных сил — кососимметричны, поперечные — симметричны.
95) Какой характер имеет деформированная схема симметричной системы при действии кососимметричной нагрузки?
Деформированная схема — кососимметрична.
96) Какие расчетные величины в сечениях, расположенных на оси симметрии, понимают под симметричными статическими и кинематическими факторами?
Статические — момент, продольная сила; кинематические — вертикальное перемещение.
97) Какие расчетные величины в сечениях, расположенных на оси симметрии, понимают под кососимметричными статическими и кинематическими факторами?
Статические — поперечная сила; кинематические — горизонтальное перемещение и угол поворота.
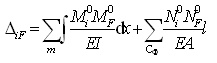
98) Какие возможны упрощения в представлении симметричной расчетной схемы при действии на неё симметричной нагрузки?
Q = 0, ΔAгориз = 0, φА = 0 + рассматривать 1/2
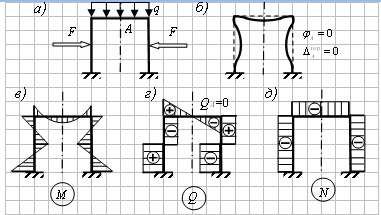
99) Какие возможны упрощения в представлении симметричной расчетной схемы при действии на неё кососимметричной нагрузки?
M = 0, N = 0, ΔAверт = 0 + рассматривать 1/2
100) Какие способы упрощений расчета Вы знаете при использовании метода сил к расчету симметричных систем?
Два приёма — способ разложения нагрузки и способ группировки неизвестных.
101) Сформулируйте основы применения способа разложения нагрузок при расчете симметричных систем.
Любую произвольную нагрузку, действующую на симметричную расчётную схему, на основании принципа независимости действия сил всегда можно разложить на симметричную и кососимметричную. Разложение должно удовлетворять условию – сумма симметричного и кососимметричного загружений должна быть равна заданному загружению. Расчёт от каждого вида загружения производится отдельно. Затем на основании принципа независимости действия сил результаты складываются.
102) Сформулируйте основы применения способа группировки неизвестных при расчете симметричных систем.
Выбирается симметричная ОСМС, свойство чисел: Y1 = X1 + X2; Y1 = X1 - X2. Результат “перемножения” симметричной эпюры усилий на кососимметричную равен нулю. Таким образом, при использовании способа группировки неизвестных система канонических уравнений, записанная для групповых неизвестных, распадается на две группы: для симметричных и кососимметричных неизвестных из-за равенства нулю побочных коэффициентов канонических уравнений. В этом и состоит эффект использования симметрии.
103) К чему приводят упрощения при расчете симметричных систем?
Позволяет уменьшить число разрешающих совместных уравнений, т. е. понизить число основных неизвестных.
104) Что понимают под степенью кинематической неопределимости?
Степень упругой подвижности узлов расчётной схемы, включающая в себя независимые угловые и линейные перемещения всех узлов. Степень подвижности её узлов (поступательные и углы поворота).
105) Какие допущения используются при определении степени кинематической неопределимости балок и рам?
Пренебрежение продольными деформациями в изгибаемых стержнях и малость деформаций по сравнению с размерами сооружения.
106) Как определить степень кинематической неопределимости расчетной схемы?
nк = nу + nл, где nу – число жёстких узлов расчётной схемы, способных к повороту при её деформации; nл – степень линейной подвижности всех узлов схемы.
107) Как определить степень линейной подвижности узлов расчетной схемы?
Непосредственно из анализа расчётной схемы. В общем случае определяется, как степень подвижности шарнирного механизма, полученного из расчётной схемы рамы путём введения сквозных шарниров во все её узлы, включая и опорные. Как степень геометрической неизменяемости этого механизма, т.е. 2У-С.
108) Как определить степень угловой подвижности узлов расчетной схемы?
Число жёстких узлов, способных к повороту + места ступенчатого изменения стержня и жёсткая часть комбинированных узлов.
109) Что принимают за неизвестные в методе перемещений?
Линейные смещения и углы поворота по направлению введённых дополнительных связей.
110) Чем отличается получение основной системы метода перемещений от получения основной системы метода сил?
В методе сил — удаление связей, в методе перемещений — добавление связей.
111) Как получить кинематически определимую основную систему?
Введением дополнительных связей по направлению линейных смещений — линейных связей, по направлению поворота жёстких узлов — плавающей заделки.
112) Зачем при получении основной системы метода перемещений вводятся дополнительные связи?
Для придания неподвижности всем узлам расчётной схемы, устранение линейных перемещений узлов и повороты узлов.
113) Запишите в общем виде систему канонических уравнений метода перемещений.
r11Z1 + r12Z2 + …+ r1iZi +…+ r1nZn +R1F = 0;
r21Z1 + r22Z2 + …+ r2iZi +…+ r2nZn Продолжение »